ລະບົບສົ່ງກຳລັງໂສ້ແມ່ນຫຍັງ? ລະບົບສົ່ງກຳລັງໂສ້ແມ່ນວິທີການສົ່ງກຳລັງທີ່ສົ່ງຕໍ່ການເຄື່ອນໄຫວ ແລະ ພະລັງງານຂອງສະເປີ້ຂັບເຄື່ອນທີ່ມີຮູບຮ່າງແຂ້ວພິເສດໄປຫາສະເປີ້ຂັບເຄື່ອນທີ່ມີຮູບຮ່າງແຂ້ວພິເສດຜ່ານໂສ້.
ລະບົບຂັບເຄື່ອນຕ່ອງໂສ້ມີຄວາມສາມາດໃນການຮັບນ້ຳໜັກທີ່ແຂງແຮງ (ຄວາມເຄັ່ງຕຶງທີ່ອະນຸຍາດສູງ) ແລະ ເໝາະສົມສຳລັບການສົ່ງກຳລັງລະຫວ່າງເພົາຂະໜານໃນໄລຍະທາງໄກ (ຫຼາຍແມັດ). ມັນສາມາດເຮັດວຽກໄດ້ໃນສະພາບແວດລ້ອມທີ່ຮຸນແຮງເຊັ່ນ: ອຸນຫະພູມສູງ ຫຼື ມົນລະພິດນ້ຳມັນ. ມັນມີຄວາມຖືກຕ້ອງໃນການຜະລິດ ແລະ ການຕິດຕັ້ງຕ່ຳ ແລະ ຕົ້ນທຶນຕ່ຳ. ຢ່າງໃດກໍຕາມ, ຄວາມໄວທັນທີ ແລະ ອັດຕາສ່ວນການສົ່ງກຳລັງຂອງລະບົບຂັບເຄື່ອນຕ່ອງໂສ້ບໍ່ຄົງທີ່, ດັ່ງນັ້ນການສົ່ງກຳລັງຈຶ່ງມີຄວາມໝັ້ນຄົງໜ້ອຍ ແລະ ມີຜົນກະທົບ ແລະ ສຽງລົບກວນທີ່ແນ່ນອນ. ສ່ວນຫຼາຍແມ່ນໃຊ້ໃນການຂຸດຄົ້ນບໍ່ແຮ່, ກະສິກຳ, ນ້ຳມັນ, ລົດຈັກ/ລົດຖີບ ແລະ ອຸດສາຫະກຳ ແລະ ເຄື່ອງຈັກອື່ນໆ, ແລະ ຮາດແວ, ເຄື່ອງໃຊ້ໃນເຮືອນ ແລະ ອຸດສາຫະກຳເອເລັກໂຕຣນິກຈຳນວນຫຼວງຫຼາຍ. ສາຍການຜະລິດຍັງໃຊ້ລະບົບຂັບເຄື່ອນຄວາມໄວສອງເທົ່າເພື່ອຂົນສົ່ງເຄື່ອງມື.
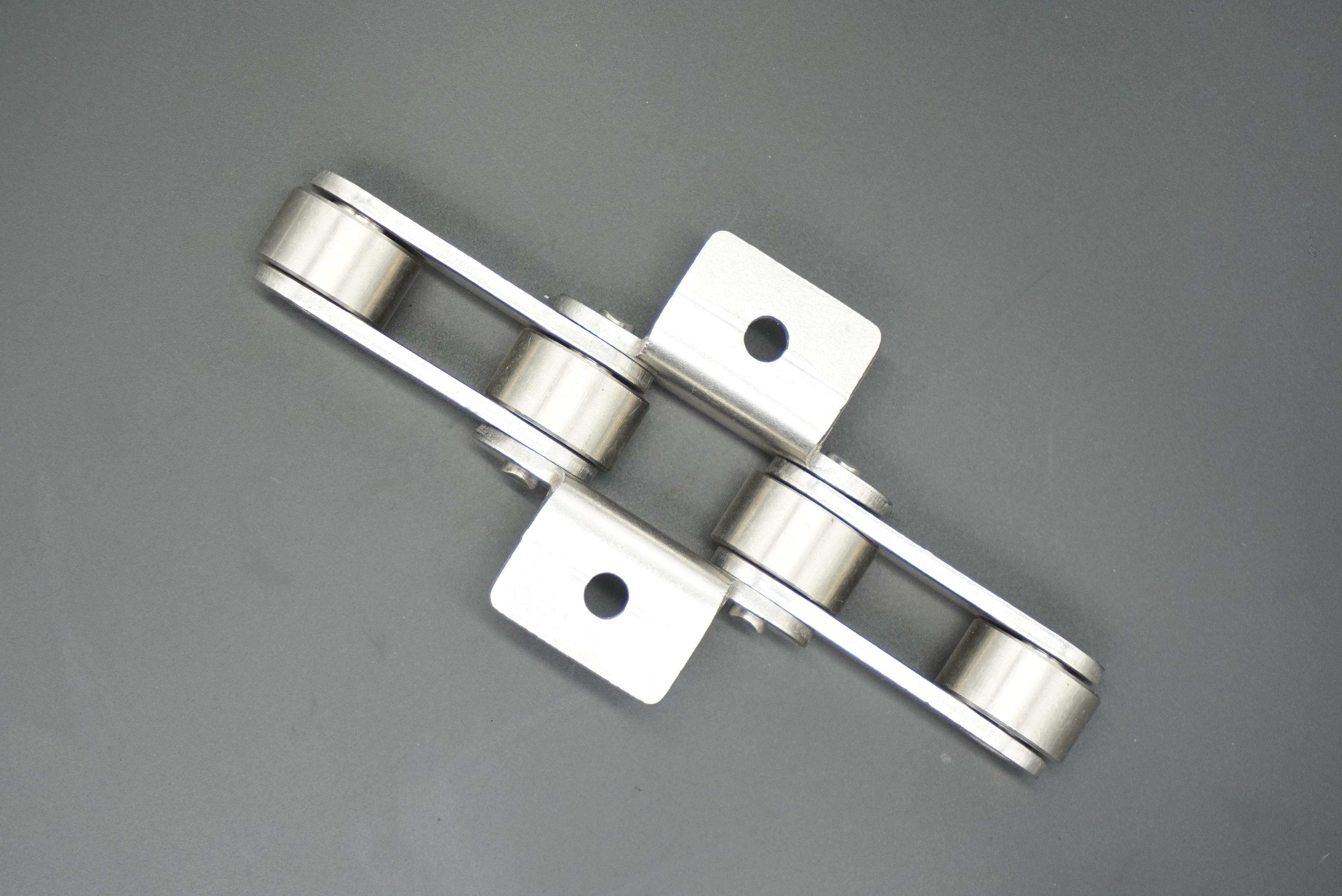
ໂສ້ຄວາມໄວສອງເທົ່າທີ່ເອີ້ນວ່າໂສ້ລໍ້. ຄວາມໄວໃນການເຄື່ອນທີ່ V0 ຂອງໂສ້ຍັງຄົງບໍ່ປ່ຽນແປງ. ໂດຍທົ່ວໄປ, ຄວາມໄວຂອງລໍ້ = (2-3) V0.
ອຸປະກອນອັດຕະໂນມັດທຳມະດາບໍ່ຄ່ອຍໃຊ້ລະບົບຂັບເຄື່ອນຕ່ອງໂສ້, ເພາະວ່າຄວາມຕ້ອງການຄວາມສາມາດໃນການໂຫຼດພາຍໃຕ້ເງື່ອນໄຂການເຮັດວຽກທົ່ວໄປບໍ່ສູງ, ແລະເນັ້ນໜັກໃສ່ຄວາມໄວສູງ, ຄວາມແມ່ນຍຳສູງ, ການບຳລຸງຮັກສາຕ່ຳ, ສຽງດັງຕ່ຳ, ແລະອື່ນໆ. ສິ່ງເຫຼົ່ານີ້ແມ່ນຈຸດອ່ອນຂອງລະບົບຂັບເຄື່ອນຕ່ອງໂສ້. ໂດຍທົ່ວໄປ, ເພົາພະລັງງານຂອງການອອກແບບກົນໄກໃນຕອນຕົ້ນຈະຂັບເຄື່ອນອຸປະກອນຂອງຫຼາຍກົນໄກຜ່ານການສົ່ງຕໍ່ຕ່ອງໂສ້. ຮູບແບບກົນໄກອຸປະກອນ "ແກນດຽວ, ຫຼາຍການເຄື່ອນໄຫວ" ນີ້ເບິ່ງຄືວ່າມີເນື້ອໃນດ້ານວິຊາການ, ແຕ່ມັນບໍ່ໄດ້ຮັບຄວາມນິຍົມໃນປະຈຸບັນ (ຄວາມຍືດຫຍຸ່ນບໍ່ດີ, ການປັບຕົວບໍ່ສະດວກ, ຄວາມຕ້ອງການການອອກແບບສູງ), ເພາະວ່າການນຳໃຊ້ຈຳນວນຫຼວງຫຼາຍພາຍໃນວິສາຫະກິດສ່ວນໃຫຍ່ແມ່ນອຸປະກອນນິວເມຕິກ, ແລະກົນໄກຕ່າງໆລ້ວນແຕ່ມີພະລັງງານເອກະລາດ (ກະບອກສູບ), ແລະການເຄື່ອນໄຫວສາມາດຄວບຄຸມໄດ້ງ່າຍດ້ວຍຄວາມຍືດຫຍຸ່ນຜ່ານການຂຽນໂປຣແກຣມ.
ສ່ວນປະກອບຂອງລະບົບຕ່ອງໂສ້ຂັບເຄື່ອນແມ່ນຫຍັງ?
ລະບົບຂັບເຄື່ອນຕ່ອງໂສ້ ເປັນວິທີການສົ່ງກຳລັງທີ່ຕ່ອງໂສ້ສົ່ງກຳລັງຜ່ານຕາໜ່າງຂອງລໍ້ ແລະ ແຂ້ວຂອງສະເປີ. ຊິ້ນສ່ວນທີ່ກ່ຽວຂ້ອງກັບລະບົບຂັບເຄື່ອນຕ່ອງໂສ້ປະກອບມີສະເປີ, ຕ່ອງໂສ້, ຕົວປັບຄວາມຕຶງ ແລະ ອຸປະກອນເສີມທີ່ກ່ຽວຂ້ອງ (ເຊັ່ນ: ຕົວປັບຄວາມຕຶງ, ຄູ່ມືຕ່ອງໂສ້), ເຊິ່ງສາມາດຈັບຄູ່ ແລະ ນຳໃຊ້ໄດ້ຢ່າງຍືດຫຍຸ່ນຕາມສະຖານະການຕົວຈິງ. ໃນນັ້ນ, ຕ່ອງໂສ້ປະກອບດ້ວຍລໍ້, ແຜ່ນໃນ ແລະ ແຜ່ນນອກ, ບຸດຊິງ, ໝຸດ ແລະ ຊິ້ນສ່ວນອື່ນໆ.
ພາລາມິເຕີທີ່ສຳຄັນຂອງລະບົບຕ່ອງໂສ້ບໍ່ສາມາດລະເລີຍໄດ້.
1. ໄລຍະຫ່າງ. ໄລຍະຫ່າງລະຫວ່າງຈຸດໃຈກາງຂອງລູກກິ້ງສອງອັນທີ່ຢູ່ຕິດກັນໃນຕ່ອງໂສ້ລູກກິ້ງ. ໄລຍະຫ່າງໃຫຍ່ເທົ່າໃດ, ຂະໜາດຂອງຊິ້ນສ່ວນກໍ່ຈະໃຫຍ່ຂຶ້ນເທົ່ານັ້ນ, ເຊິ່ງສາມາດສົ່ງກຳລັງໄດ້ສູງຂຶ້ນ ແລະ ຮັບນ້ຳໜັກໄດ້ຫຼາຍຂຶ້ນ (ສຳລັບລະບົບສົ່ງກຳລັງຂອງຕ່ອງໂສ້ລູກກິ້ງຄວາມໄວຕ່ຳ ແລະ ນ້ຳໜັກຫຼາຍ, ໄລຍະຫ່າງຄວນເລືອກຂະໜາດໃຫຍ່). ໂດຍທົ່ວໄປ, ທ່ານຄວນເລືອກຕ່ອງໂສ້ທີ່ມີໄລຍະຫ່າງຕ່ຳສຸດທີ່ມີຄວາມສາມາດໃນການສົ່ງກຳລັງທີ່ຕ້ອງການ (ຖ້າຕ່ອງໂສ້ແຖວດຽວມີຄວາມຈຸບໍ່ພຽງພໍ, ທ່ານສາມາດເລືອກຕ່ອງໂສ້ຫຼາຍແຖວໄດ້) ເພື່ອໃຫ້ໄດ້ສຽງລົບກວນ ແລະ ຄວາມໝັ້ນຄົງຕ່ຳ.
2. ອັດຕາສ່ວນການສົ່ງກຳລັງທັນທີ. ອັດຕາສ່ວນການສົ່ງກຳລັງທັນທີຂອງລະບົບຕ່ອງໂສ້ຂັບເຄື່ອນແມ່ນ i=w1/w2, ບ່ອນທີ່ w1 ແລະ w2 ແມ່ນຄວາມໄວໃນການໝູນຂອງສະເກວຂັບເຄື່ອນ ແລະ ສະເກວຂັບເຄື່ອນຕາມລຳດັບ. i ຕ້ອງຕອບສະໜອງເງື່ອນໄຂສະເພາະ (ຈຳນວນແຂ້ວຂອງສະເກວສອງອັນແມ່ນເທົ່າກັນ, ແລະຄວາມຍາວຂອງດ້ານທີ່ແໜ້ນແມ່ນຈຳນວນເຕັມຂອງເວລາຂອງ pitch), ເປັນຄ່າຄົງທີ່.
3. ຈຳນວນແຂ້ວ pinion. ການເພີ່ມຈຳນວນແຂ້ວ pinion ຢ່າງເໝາະສົມສາມາດຫຼຸດຜ່ອນຄວາມບໍ່ສະໝໍ່າສະເໝີຂອງການເຄື່ອນໄຫວ ແລະ ການໂຫຼດແບບໄດນາມິກໄດ້.
ເວລາໂພສ: ວັນທີ 23 ກັນຍາ 2023